
Способы подстройки частоты лабораторного инвертора.
Кухтецкий С.В., ku_@mail.ru
- Введение
- Автономные генераторы
- Автогенераторы
- Инверторы с ФАПЧ
- Выводы и обсуждение
- Литература
- Благодарности
В статье рассмотрены способы регулировки частоты - еще одного важнейшего параметра, определяющего работу инвертора. Подробно проанализированы три класса решений задачи подстройки инвертора на резонансную частоту нагрузки: автономный генератор, автогенератор и ФАПЧ. Статья продолжает цикл публикаций, посвященных самодельным лабораторным инверторам, и ориентирована на экспериментаторов, которые не являются специалистами в силовой электронике, но хотели бы использовать инверторы в своей лабораторной практике (индукционный нагрев, источники питания электрических разрядов и ультразвуковых излучателей, и т.д.). Поэтому часть материала изложена в виде популярных физических демонстраций, а конкретные решения представлены в виде законченных практических схем со всеми сопутствующими материалами.
В предыдущей статье [1] мы рассмотрели основные способы регулирования мощности инверторов. На одном из них мы остановились подробно. Это - PDM (модуляция плотности управляющих импульсов). Он удобен тем, что позволяет обеспечить плавную регулировку мощности инвертора от нуля до максимального уровня, сохраняя «мягкий» режим переключения силовых ключей во всем диапазоне регулировки мощности. При этом, в отличие от другого известного способа, гарантирующего «мягкость» переключения ключей, для PDM не требуется применения регулируемых источников питания, сопоставимых по мощности с самим инвертором.
Вторым важнейшим параметром является рабочая частота инвертора. Особенно важен этот параметр при работе инвертора на нагрузку с резонансной частотной характеристикой. Такие нагрузки характерны для многих лабораторных приложений. Поэтому данная статья посвящена рассмотрению вопросов, связанных с регулировкой частоты инверторов и автоматической подстройки частоты (АПЧ) инверторов в резонанс с нагрузкой.
Естественно, поскольку для регулирования мощности лабораторного инвертора мы используем PDM, то вопросы совместимости АПЧ с PDM будут играть решающую роль в выборе вариантов АПЧ. Второе предварительное замечание заключается в том, что, как и раньше, мы ограничимся анализом только инверторов напряжения и только с последовательным колебательным контуром в качестве нагрузки.
Точная подстройка частоты инвертора на резонансную частоту нагрузки важна, главным образом, по двум причинам. Во-первых, при точной настройке на резонанс реактивные составляющие нагрузки полностью скомпенсированы. Это позволяет всю номинальную мощность инвертора «направить» на полезный нагрев образца. Во-вторых, в условиях резонанса фазы тока в контуре и напряжения на нем совпадают. Это дает возможность переключать ключи инвертора напряжения точно в момент прохождения тока через ноль. Такой «мягкий» режим переключения существенно облегчает работу силовых ключей. Более того, в «мягком» режиме IGBT-ключи можно использовать на частотах в два и даже в три раза более высоких, чем при «жестком» переключении.
К сожалению, резонансная частота нагрузки может изменяться в довольно широких пределах. Причем не только при смене нагреваемого образца или индуктора, но и непосредственно в процессе работы инвертора. Это может происходить, например, при изменении геометрии образца в процессе плавки, изменении его физических характеристик с ростом температуры (проводимость, магнитная проницаемость) и т.п. Особенно это становится важным при высокодобротных нагрузках, в которых даже небольшие смещения от резонанса могут вызывать значительные колебания мощности, потребляемой нагрузкой. Несколько простых демонстраций на эту тему можно посмотреть в конце работы [1]. Поэтому к методу подстройки частоты выдвигается еще одно важное требование - в зависимости от задачи, подстройка должна иметь ту или иную степень автоматизации.
Анализируя всевозможные способы настройки рабочей частоты инвертора в резонанс с нагрузкой, мы можем выделить три основных класса решений. Название этих классов довольно условное, причем классификацию мы проводим не по принципу генерации переменного сигнала, а скорее - по принципу настройки частоты генератора на резонансную частоту нагрузки.
- Первый класс – это автономные генераторы. Автономный генератор – это своеобразная «вещь в себе», и его частота напрямую не связана с резонансной частотой нагрузки. Частота автономного генератора зависит только от значения его собственных параметров, изменяя которые мы как раз и можем ее контролировать. Этот контроль может быть ручным или автоматическим (от внешней системы управления на микроконтроллерах или от PC). Для настройки автономного генератора на резонансную частоту можно использовать один из двух вариантов. Первый заключается в предварительном измерении резонансной частоты нагрузки тем или иным способом. Например, по максимуму тока, потребляемого инвертором. При этом предполагается, что в процессе работы эта частота не будет существенно изменяться. Второй способ более гибкий – можно организовывать специальные паузы в штатной работе инвертора (когда имеют место вынужденные колебания контура-нагрузки). Во время этих пауз контур совершает свободные колебания уже с собственной (резонансной) частотой. Эту частоту можно измерять и использовать для настройки автономного генератора. Для инверторов с PDM такие паузы даже не нужно организовывать специально. Они всегда существуют в цикле работы инвертора при мощностях меньших, чем 100%.
- Второй класс решений - автогенераторы. Практически любой инвертор несложно превратить в автогенератор следующим образом. С контура (нагрузки) берется сигнал, пропорциональный току, текущему через нагрузку (напомним, что речь идет об инверторах напряжения). После усиления и, возможно, некоторых дополнительных преобразований, этот сигнал поступает непосредственно на вход драйверов силовых ключей инвертора. Естественно, фаза сигнала должна быть такой, чтобы общая обратная связь была положительной. Иначе автогенератор просто не будет работать. При достаточно высоком коэффициенте усиления и не очень больших нагрузках в системе возникнут автоколебания с частотой, близкой к резонансной частоте контура нагрузки. Наша задача («настройка» автогенератора) решается совершенно автоматически за счет избирательности контура, включенного в цепь положительной обратной связи.
- Ну и, наконец, решения, основанные на минимизации разности фаз сигналов тока и напряжения, снимаемых с нагрузки. Т.е. - системы с ФАПЧ (фазовая автоподстройка частоты). Так же как и в первом случае, здесь используется независимый генератор (обычно это ГУН – генератор управляемый напряжением), но система автоматического управления этим генератором организована так, чтобы ГУН генерировал сигнал такой частоты, при которой разность фаз между током и напряжением на контуре была равна нулю. Т.е. - именно на резонансной частоте. Итак, в инверторах такого рода с контура берутся два сигнала (ток и напряжение), которые после соответствующих преобразований, подаются на вход фазового детектора (ФД). Сигнал с выхода ФД, пропущенный через фильтр низких частот (ФНЧ), подается на управляющий вход ГУН. Частота ГУН пропорциональна входному напряжению. Выходной сигнал ГУН подается уже непосредственно на вход инвертора. Таким образом, мы получаем систему управления с отрицательной обратной связью по частоте. Равновесное состояние этой системы соответствует частоте ГУН, совпадающей с резонансной частотой нагрузки. Как мы увидим ниже, такие системы обеспечивают максимально точную подстройку инвертора на резонанс с нагрузкой. К сожалению, их очень трудно совместить с PDM-регулированием мощности. Причина в том, что не во все периоды рабочего цикла инвертора с нагрузочного контура можно взять два сигнала – во время пауз свободных колебаний напряжение на контуре равно нулю. Без специальных мер это, естественно, приводит к сбою ФАПЧ.
Итак, мы выделили три основных класса систем, различающихся принципом подстройки инвертора в резонанс с нагрузкой. Теперь перейдем к их более подробному обсуждению и сравнительному анализу.
Блок-схема инвертора с автономным генератором импульсов представлена на рис.1.
Рис.1. Блок-схема инвертора с автономным генератором импульсов.
Практически все схемы инверторов, не использующие автоматическую подстройку частоты, устроены аналогично. Простейшие конструкции лабораторных инверторов, описанные ранее [2, 3], с точки зрения регулирования частоты имеют точно такую же структуру. В них в качестве автономного генератора используется генератор, входящий в состав драйвера силовых ключей, а для ручной регулировки частоты использованы переменные резисторы. Однако, несмотря на простоту, такие простые решения обладают рядом существенных недостатков.
- Во-первых, они почти не поддаются автоматизации. Т.е. на них очень трудно организовать автоматическую подстройку частоты при помощи какой-нибудь внешней управляющей системы на базе PC или микроконтроллеров.
- Во-вторых, для относительно плавной регулировки приходится использовать дорогие прецизионные многооборотные резисторы. Использование дешевых моделей может привести к непредсказуемой работе автономного генератора и аварийным ситуациям.
Поэтому приходится использовать более сложные, но и более надежные решения.
ФАПЧ-синтезатор частоты. Схема и конструкция
Одним из таких решений является использование синтезаторов частоты. Синтезатор частоты представляет собой устройство, которое на основе некоторых операций с некоторой стабильной (опорной) частотой получает сигнал с другой, требуемой частотой. Обычно в таких системах используют операции целочисленного умножения и деления частоты. В этом случае частота синтезированного сигнала Fout = Fin*N/M, где N и M – целые числа, Fin – опорная частота, Fout – частота на выходе синтезатора. Таким образом, при достаточно большом M мы можем получить плотную сетку частот, пригодную для точной настройки инвертора на резонанс даже с высокодобротными нагрузками.
Существует множество вариантов синтезаторов – от чисто цифровых до полностью аналоговых. Их описание легко найти в Интернете. См., например, подборку статей в [4]. Здесь же мы остановимся на так называемых ФАПЧ-синтезаторах частоты, подробное описание которых можно найти, например, в первой статье этой подборки [5]. Принцип действия ФАПЧ синтезатора основан на возможности системы ФАПЧ производить операцию умножения частоты (операция деления легко осуществляется при помощи обычных счетчиков). Блок-схема ФАПЧ-синтезатора частоты представлена на рис.2.
Рис.2. Блок-схема ФАПЧ-синтезатора частоты.
Опорная частота Fin делится первым делителем частоты на коэффициент M и подается на один вход фазового детектора. На второй вход ФД подается выходной сигнал ГУН, деленный на N вторым счетчиком. В результате действия системы ФАПЧ равновесная частота ГУН будет такая, чтобы фазы и частоты сигналов на входе фазового детектора совпали. Т.е. Fin/M = Fout/N. Таким образом, на выходе ГУН мы получим сигнал с частотой Fout = Fin*N/M. Как раз то, что нам и нужно.
Вариант практической схемы ФАПЧ-синтезатора с управлением на микроконтроллере ATtiny2313 представлен на рис.3.
Рис.3. Практическая схема синтезатора.
Сама ФАПЧ реализована на широко распространенной микросхеме CD4046BE. Используется фазовый детектор 2, входящий в состав этой микросхемы, и ГУН. В качестве делителей используются таймеры-счетчики TIMER0 и TIMER1, входящие в состав периферии микроконтроллера ATtiny2313. В качестве опорной частоты используется тактовая частота микроконтроллера (16МГц). Таймер-счетчик TIMER0 осуществляет деление опорной частоты. Коэффициент деления 250 с предварительным делителем 1024, т.е. M = 256000. Результирующий сигнал имеет частоту 62.5 Гц, которая и определяет дискретность изменения частоты синтезатора. В принципе, можно было бы взять и просто 50 Гц от сети, но лишняя дополнительная «привязка» к сети здесь, все-таки, «не перевесила» некоторого неудобства в подсчете шагов. Другой простой вариант – кварц с соответствующей частотой.
Выходной сигнал делителя на TIMER0 (62.5 Гц) с вывода OC0A подается на один вход фазового детектора. В свою очередь, выходной сигнал ГУН (VCO Out) подается на вход счетчика-делителя TIMER1 (вход T1 микроконтроллера), который делит частоту выходного сигнала ГУН на устанавливаемый пользователем коэффициент N. Сигнал с выхода счетчика делителя (OC1A) подается на второй вход фазового детектора.
Цепочка R1, C4, R2 выполняет функции ФНЧ. Резистор R2 демпфирует колебания частоты ГУН, вызванные изменением коэффициента деления счетчика TIMER1 при регулировании частоты синтезатора.
Помимо «предоставления» счетчиков-делителей, микроконтроллер выполняет еще и сервисные функции: обслуживание кнопок ручного изменения частоты (+/-), кнопки сохранения текущего значения частоты в энергонезависимой памяти микроконтроллера (EEPROM). Последняя опция очень удобна при работе с постоянной нагрузкой (например, графитовой печью). В этом случае при включении питания синтезатор сразу же начнет работать на сохраненной с EEPROM частоте.
Микроконтроллер также способен принимать информацию по USART для управления частотой от внешней системы. В этом случае появляется возможность автоматизировать подстройку частоты при помощи внешней управляющей системы, которая может производить независимые измерения резонансной частоты нагрузки в процессе работы и, на основании этой информации, управлять синтезатором.
Печатная плата, файлы прошивки, файл для инициализации EEPROM и исходный файл программы находятся в папке “Syn” архива этой статьи [6]. Данная конструкция предназначена для лабораторных экспериментов с «ручным» управлением частотой. Поэтому кнопки управления синтезатором расположены непосредственно на плате, а весь функционал, связанный с обменом информацией с внешними устройствами, не реализован. Также отсутствует и соответствующий разъем на плате для подключения внешней управляющей системы.
Готовая плата синтезатора в процессе испытаний показана на рис.4.
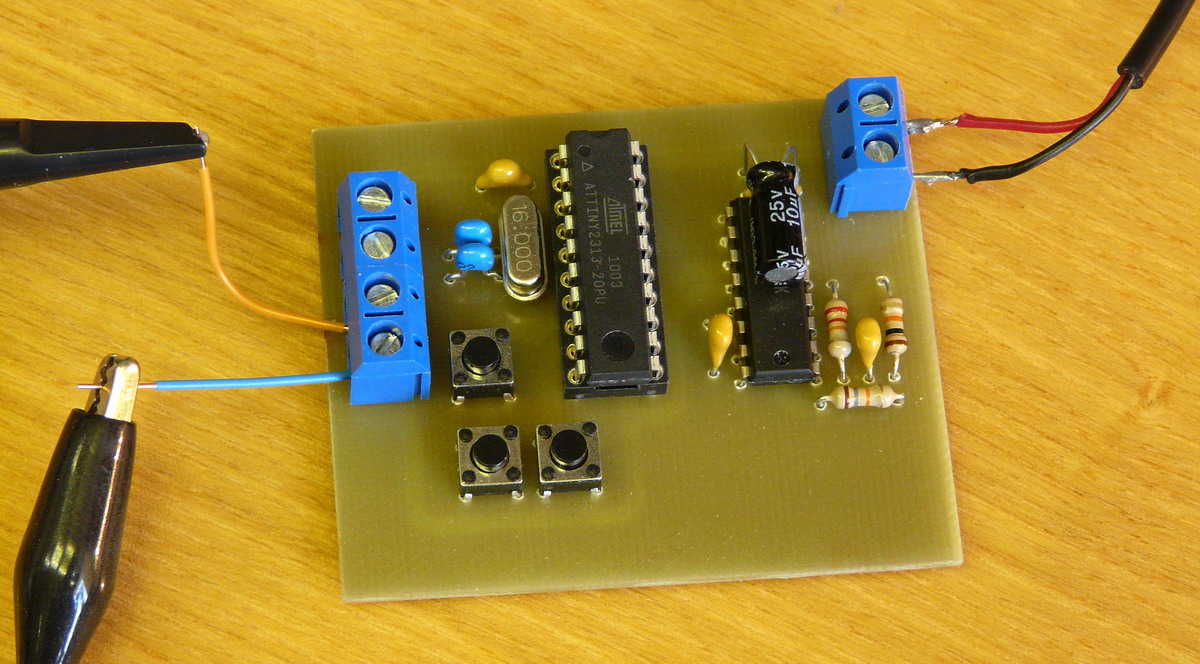
Рис.4. Синтезатор в процессе испытаний.
Если плата правильно собрана и микроконтроллер прошит (не забудьте загрузить файл «main.eep» в EEPROM!), то синтезатор работает сразу, на частоте, которая будет сохранена в памяти EEPROM при ее «прошивке» (150 кГц).
При нажимании кнопок «+»/«-» частота должна увеличиваться с шагом 62.5 Гц. При удержании кнопок шаг плавно увеличивается до 1кГц. При указанных на рис.3 номиналах и прилагаемой прошивке диапазон регулирования частоты составляет 100-300 кГц. Для смещения этого диапазона в область низких частот, необходимо увеличить емкость конденсатора C5 и скорректировать в программе пределы изменения N (определения NMin и NMax). Скорректированные значения NMin и NMax можно посчитать по формуле: N = F/62.5 – 1, где F - частота в Гц.
На рис. 5 представлена пара осциллограмм в крайних точках диапазона.
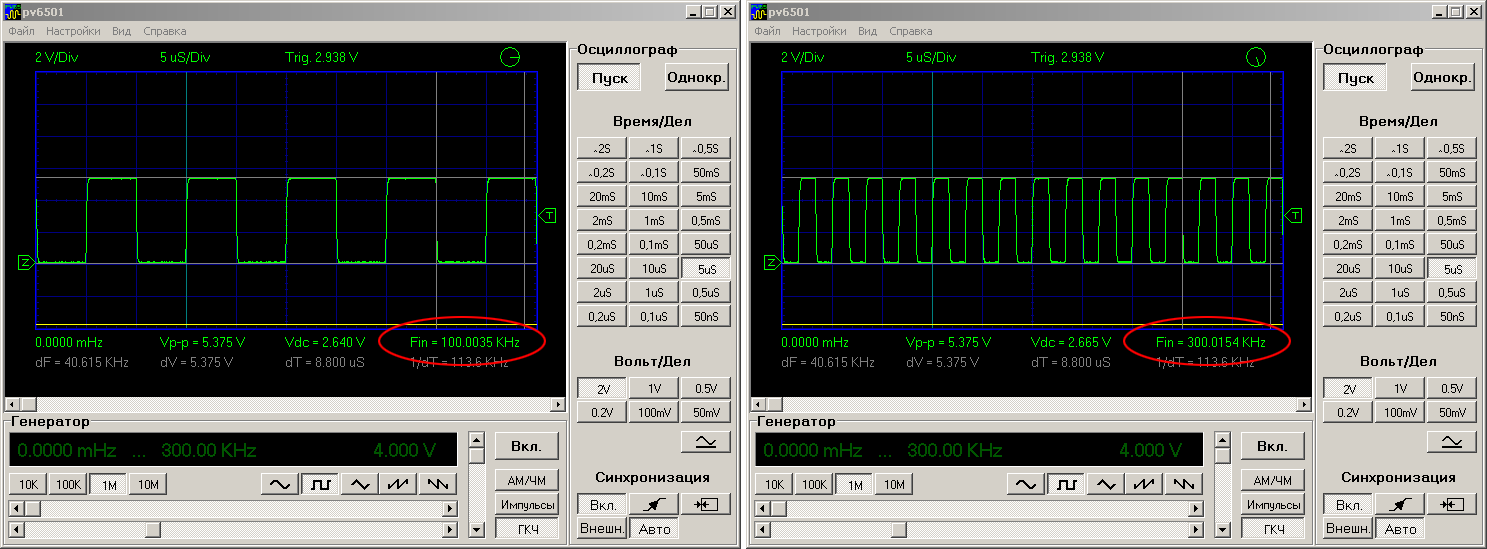
Рис.5. Примеры осциллограмм с выхода синтезатора.
Как уже отмечалось, нажатием кнопки «Сохранить» текущее значение частоты (коэффициент N) будет сохранен в EEPROM, и при следующем включении питания (или перезагрузке МК) синтезатор будет использовать сохраненное значение N.
Описанный выше синтезатор может быть легко интегрирован в любое решение, основывающееся на автономном генераторе управляющих импульсов, в том числе и в первые, простейшие варианты лабораторного инвертора, описанные в предыдущих статьях [3, 4]. Естественно, при этом нужно позаботиться о питании синтезатора. Кроме этого в силовой части нужно использовать микросхемы драйверов с внешним источником управляющих импульсов. Т.е. вместо IR2153 нужно поставить, например, IR2109 или IR2111.
В принципе, такой синтезатор частоты можно использовать в сочетании с какой-нибудь системой измерения частоты свободных колебаний нагрузки. Предварительные эксперименты в этом направлении были проделаны. Для измерения периода свободных колебаний использовался второй микроконтроллер (ATtiny2313) в режиме «захвата». Измерения проводились на инверторе с PDM-регулированием мощности в те периоды, когда контур совершал свободные колебания. По измеренному периоду определялась частота и по USART передавалась в синтезатор. Такая система оказалась вполне работоспособной, но, к сожалению, только на относительно низких частотах (десятки кГц). На более высоких частотах такая техника измерения периода дает слишком большую погрешность и «болтанка» рабочей частоты инвертора становится недопустимыми. Поэтому необходимо использовать более точную процедуру измерения периода свободных колебаний.
Либо - рассмотреть другие концепции автоподстройки частоты. К чему мы и приступим.
Инвертор напряжения легко превратить в автогенератор, введя положительную обратную связь согласно блок-схеме, приведенной на рис.6.
Рис.6. Блок-схема автогенератора.
Сигнал с трансформатора тока подается на компаратор, который можно рассматривать просто как усилитель с бесконечным коэффициентом усиления. Прямоугольные импульсы с выхода компаратора могут подвергнуться дополнительной обработке (об этом поговорим ниже) или поступить непосредственно на вход инвертора.
Мы видим, что для работы автогенератора не требуется никаких дополнительных генераторов. Это большой плюс таких систем. Но при этом возникает вопрос – на какой частоте будет работать такой автогенератор? С первого взгляда кажется - что на резонансной частоте контура (нагрузки). Действительно, отклик контура (а, значит и сигнал тока) максимален на резонансной частоте. Поэтому начальные возмущения с такой частотой будут усиливаться в цепи обратной связи больше, чем возмущения с другой частотой. В конце концов, эта мода «победит» все остальные. На самом деле это справедливо только для идеальных систем с пренебрежимо малыми задержками.
У реальных же двухтактных инверторов суммарная задержка распространения сигнала может доходить до микросекунды и более. В основном эта задержка обусловлена необходимостью применения паузы dead-time. Обычно dead-time составляет нескольких сотен наносекнуд и выше для MOSFET и до двух микросекунд для IGBT. Еще несколько сотен дополнительных наносекунд добавляют задержки в драйверах и силовых элементах.
Наличие этой задержки приводит к тому, что автогенератор работает на частоте ниже резонансной. Эта задержка практически не зависит от частоты. Поэтому понятно, что с ростом частоты (т.е. с падением периода колебаний) ее вклад будет все заметнее и заметнее. Чтобы почувствовать влияние этой задержки, немного поэкспериментируем с низковольтной моделью инвертора с искусственными задержками.
Автогенератор на базе модели инвертора с задержкой
Влияние задержек на рабочую частоту автогенератора мы будем изучать на простейшей модели инвертора, схема которого представлена на рис.7.
Рис.7. Схема автогенератора на базе модели инвертора с задержкой.
В качестве модели инвертора мы возьмем усилитель (MAX4420), мощности которого вполне достаточно для возбуждения контура и получения приемлемого сигнала с трансформатора тока. Поскольку нас интересует влияние задержек в инверторе на частоту автогенератора, то для моделирования задержки реального инвертора перед усилителем поставим цепочку R5, C4 и два буферных элемента для согласования с IC1. В качестве компаратора использован достаточно быстрый Rail-to-Rail компаратор MAX942. Небольшое смещение порога срабатывания необходимо для устранения шумов. По сути дела этот компаратор делает коэффициент усиления нашей цепи обратной связи почти бесконечным, обеспечивая ключевой режим работы инвертора. Еще два логических элемента на входе инвертора обеспечивают возможность ручного запуска автогенератора, если его автоматический запуск будет затруднен по тем или иным причинам.
Замкнем цепь положительной обратной связи (выход компаратора замыкаем на вход модели инвертора). В цепи обратной связи находится четное количество инвертирующих логических элементов, сам усилитель (MAX4420) неинвертирующий. Компаратор также включен без инверсии. Необходимо позаботиться только о том, чтобы трансформатор тока тоже не изменял фазу сигнала, т.е. сигнал отклика контура (ток) должен быть «в фазе» с сигналом напряжения, выдаваемым инвертором. Суммарная задержка в цепи обратной связи при указанных на схеме номиналах составляет около 0.75 мкс. Сигналы тока и напряжения на контуре снимаются с точек, показанных на рисунке. В данной работе используется однолучевой осциллограф, поэтому сигнал напряжения подается на вход синхронизации. В используемой модели осциллографа (PV6501) бинаризованный сигнал синхронизации выводится на экран желтым цветом. Это дает возможность судить о взаимном расположении во времени сигналов тока и напряжения.
Собранный макет базовой модели автогенератора показан на рис.8.
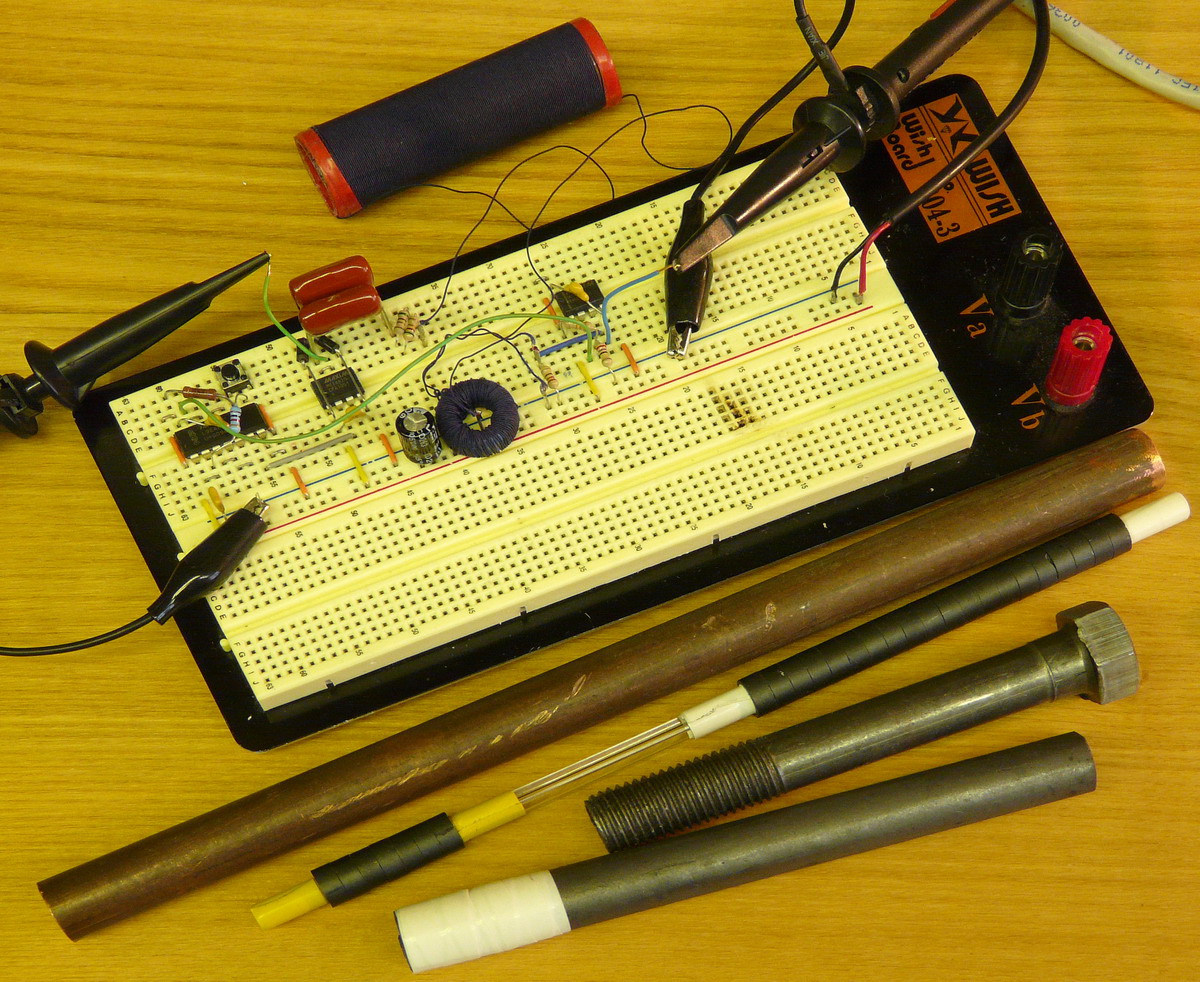
Рис.8. Собранный макет автогенератора.
Рядом с макетом находятся несколько образцов, которые будут помещаться в контур для изменения его резонансной частоты и добротности. В наших экспериментах мы будем использовать следующие образцы.
- Медный стержень. Это хорошо проводящий немагнитный материал. Резонансная частота сдвигается в сторону высоких частот почти на 100 кГц. Добротность контура остается еще достаточно высокой.
- Стопка ферритовых колец, надетых на стеклянную палочку. Это непроводящий ферромагнитный материал с большой магнитной проницаемостью, Резонансная частота сдвигается вниз по частоте, добротность контура тоже изменяется слабо.
- Стальной болт - проводящий ферромагнитный материал с большой магнитной проницаемостью. Для моделирования очень низкодобротных нагрузок.
- И графитовый стержень. Частота сдвигается слабо. Заметно уменьшается добротность контура. Можно сказать, что этот образец – нейтральный «вкладыш» для уменьшения добротности.
- Автогенератор готов - можно приступать к экспериментам.
Результаты экспериментовПравильно собранный макет с «пустым» индуктором обычно запускается сразу при включении питания. Если этого не произошло, можно воспользоваться кнопкой «Запуск». Из осциллограммы тока, представленной на рис.9 слева, мы видим, что автогенератор работает на частоте (145.5 кГц), несколько меньшей чем резонансная частота контура (149.5 кГц). Значение частоты выводится в рабочей части панели справа внизу под осциллограммами. «Расстройка» составляет 4 кГц. Мы видим также, что фазы тока и напряжения не совпадают. Переключение ключей происходит заметно позже прохождения тока через ноль. Т.е. ключи «работают» в достаточно «жестком» режиме. Величина запаздывания составляет около 0.6 мкс. Для наглядности в правой части рис.3 приведена АЧХ контура. Поскольку возбуждение контура велось меандром, то появляются дополнительные резонансы на нечетных гармониках (меньшие пики в левой части диаграммы). На них можно не обращать внимание. Рабочая частота автогенератора обозначена красной линией, резонансная, естественно – в пике АЧХ.
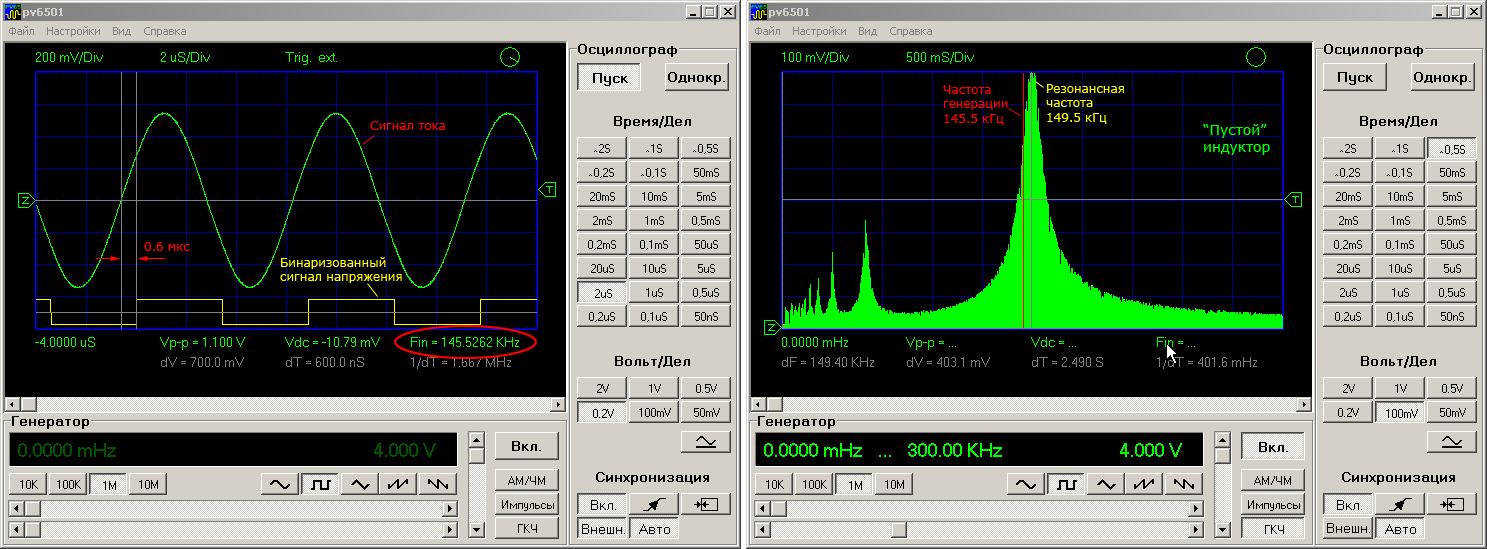
Рис.9. Осциллограммы сигналов (слева) и АХЧ (справа) для «пустого» индуктора.Посмотрим реакцию автогенератора на внесение медного стержня в индуктор (рис.10).
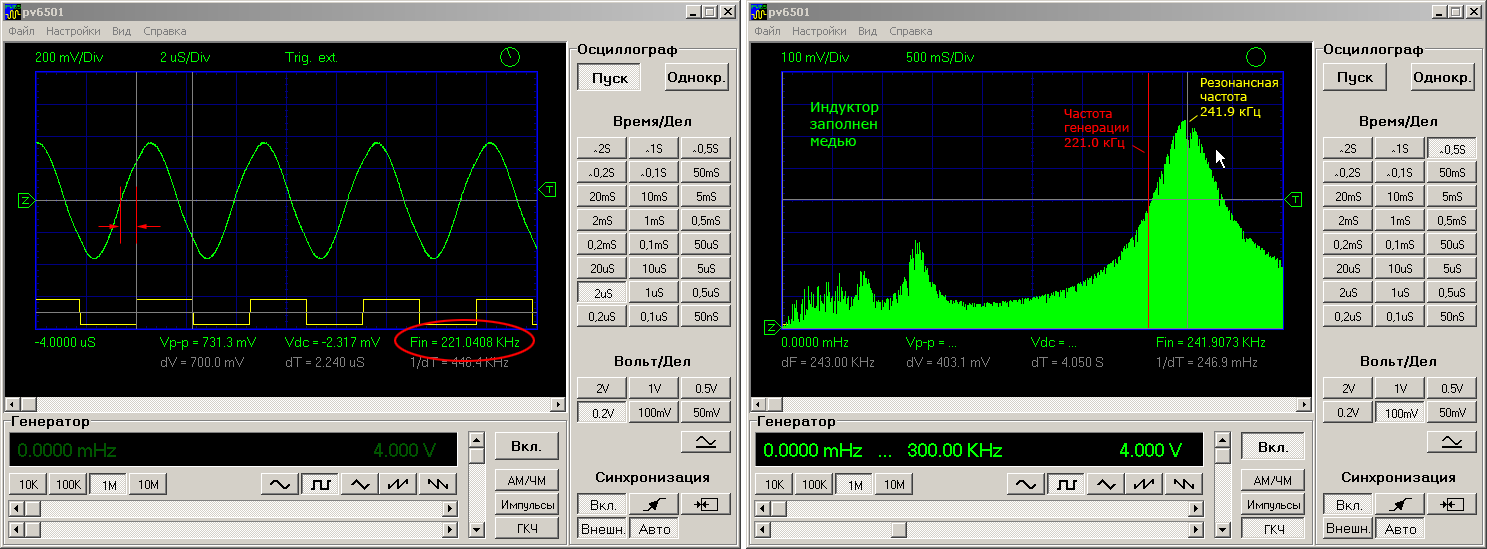
Рис.10. Осциллограммы сигналов и АЧХ для индуктора, заполненного медью.Мы видим, что частота автогенератора возросла до 221 кГц, но отличие ее от резонансной частоты (241.9 кГц) стало еще больше. «Расстройка» – более 20 кГц! Из правой части мы видим, что фактически автогенератор «выдает» только четверть номинальной мощности инвертора (половина по амплитуде), а переключения ключей происходят уже близко к максимуму тока (рис.10 слева). Т.е. простой автогенератор справляется с автоматической подстройкой частоты довольно плохо.
Посмотрим реакцию автогенератора на другие образцы, вставляемые в индуктор. Осциллограммы для феррита и стали приведены на рис.11. Задержка напряжения относительно тока все та же, но из-за более низкой частоты (для феррита) выглядит не так удручающе.
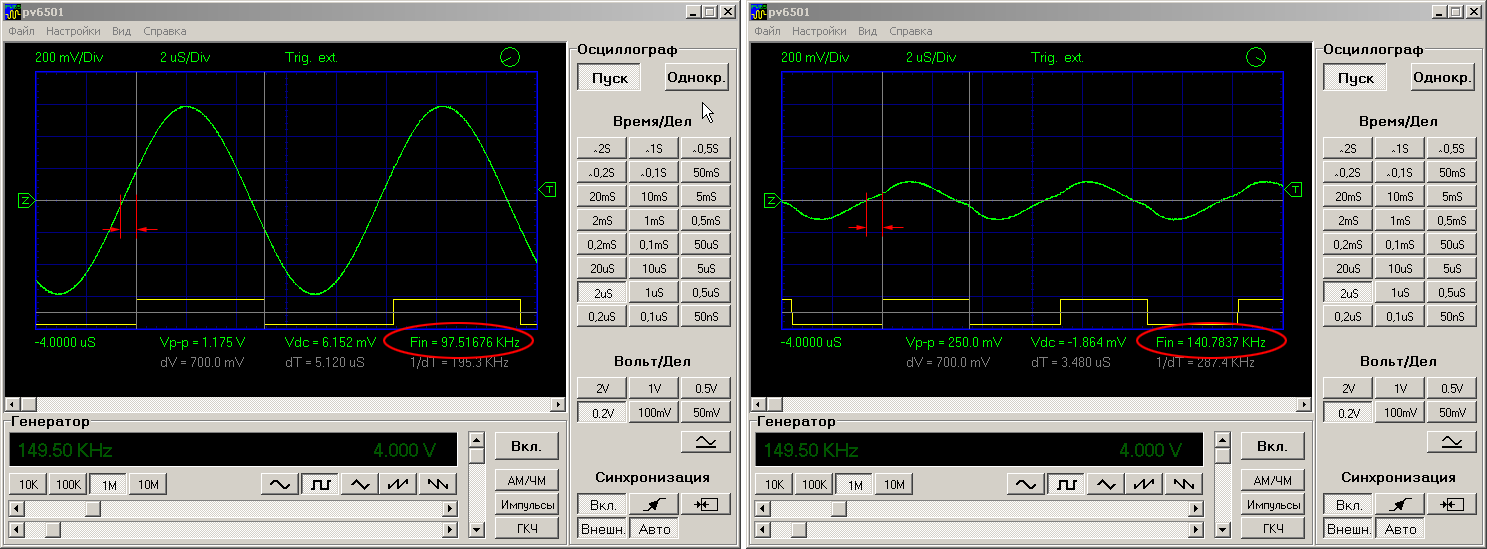
Рис.11. Осциллограммы тока для ферритового (слева) и стального (справа) образцов.
Итак, мы видим, что в целом свою главную задачу (автоматическая подстройка частоты в резонанс с нагрузкой) автогенератор все-таки пытается выполнить. Однако делает он это не очень хорошо, а на высоких частотах (сотни кГц) - просто неудовлетворительно. Причина очевидна. Это – задержка сигнала в инверторе. К сожалению, в двухтактных инверторах напряжения (из-за необходимости использовать dead-time) эта задержка в принципе неустранима. Поэтому нужно искать какие-то способы компенсации этой задержки. Этим мы и займемся в следующем разделе.
Компенсирующая задержкаИтак, нам нужно компенсировать задержку сигнала в инверторе. Пусть эта суммарная задержка равна dt. Предположим, что у нас есть устройство «компенсатор», которое выполняет «отрицательную» задержку сигнала на –dt. Конечно, мы не пытаемся сделать «машину времени» или нарушать один из фундаментальных принципов нашего мира - принцип причинности. В нашем случае отрицательность задержки означает только то, что выходной сигнал опережает входной на время dt, что для периодических сигналов не представляет ничего сверхъестественного. Расположив такой компенсатор в цепи обратной связи, мы получим автогенератор с нулевой суммарной задержкой (рис.12).
Рис.12. Схема компенсации задержки инвертора.В идеале такой автогенератор будет работать на частоте, строго совпадающей с резонансной частотой нагрузки, а переключение ключей инвертора будут происходить точно в нуле тока. Осталось только сделать такой компенсатор.
Поскольку мы имеем дело с периодическим сигналом, то ничего сложного здесь нет. В простейшем случае мы могли бы просто дополнительно задержать сигнал тока на время (T-dt), где T – период колебаний, при помощи, например, цифровой линии задержки. Поскольку сигнал периодический, то такая задержка эквивалентна «отрицательной» задержке сигнала на –dt. К сожалению, у этого простого метода есть один существенный недостаток – величина задержки зависит от частоты сигнала. Т.е. ее придется каждый раз подстраивать при изменении рабочей частоты инвертора, что, конечно же, неудобно.
Другой сравнительно простой способ реализовать «отрицательную» задержку периодического сигнала – использовать независимый генератор импульсов, который просто будет выдавать выходной сигнал, опережающий по фазе сигнал тока. Сделать это довольно просто при помощи стандартной схемы ФАПЧ, если между выходом ГУН и одним входом фазового детектора поставить линию задержки на dt. Блок-схема такого узла показана на рис.13.
Рис.13. Получение опережающего сигнала при помощи ФАПЧ.При наличии задержки dt в петле ФАПЧ, ГУН будет генерировать сигнал, совпадающий с входным сигналом по частоте, но «опережающий» его по фазе на величину dt. Т.е. именно то, что нам нужно. Вариант практической схемы такого узла, выполненного на микросхеме CD4046BE, представлен на рис.14.
Рис.14. Практическая схема компенсатора задержек.Соберем макет этой схемы и немножко исследуем его. Т.к. на входе и на выходе (буферные элементы не показаны) цифровые сигналы, то понятно, что АЧХ этой схемы «равномерна» в пределах устойчивой генерации ГУН. Т.е. никакой избирательности по частоте у данного устройства нет. При указанных номиналах, регулируя R6, мы можем изменять «отрицательную задержку» от 0 до -2.2 мкс, что вполне достаточно для компенсации задержек даже у инверторов на IGBT. На рис.15 представлены осциллограммы входного и выходного сигналов при двух значениях R6.
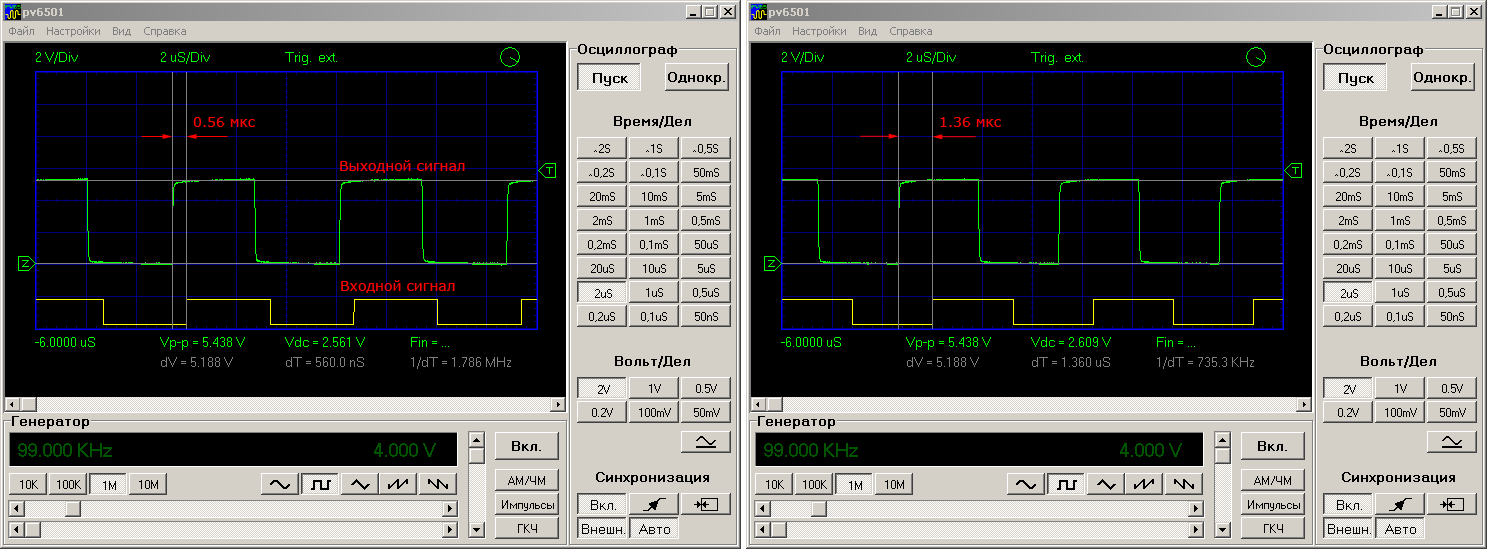
Рис.15. Примеры отрицательных задержек.Мы видим, что схема выдает опережающий сигнал с регулируемой «отрицательной задержкой». Частотная зависимость «отрицательной задержки», при фиксированном R6 = 4.7 кОм, представлена на рис.16.
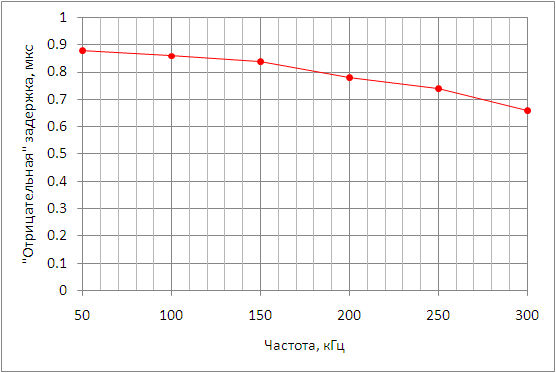
Рис.16. Зависимость величины задержки от частоты.Не будем вдаваться в механизмы слабого понижения задержки с ростом частоты. Просто отметим, что зависимость величины задержки от частоты достаточно слабая. Это позволяет с приемлемой точностью скомпенсировать задержку инвертора во всем рабочем диапазоне (30-300 кГц), без дополнительной подстройки компенсирующей задержки в процессе работы.
Модель автогенератора с компенсацией задержки
Теперь мы можем собрать полный макет автогенератора с компенсатором задержки. Схема макета представлена на рис.17, а фотография – на рис.18.
Рис.17. Схема автогенератора с компенсацией задержки.
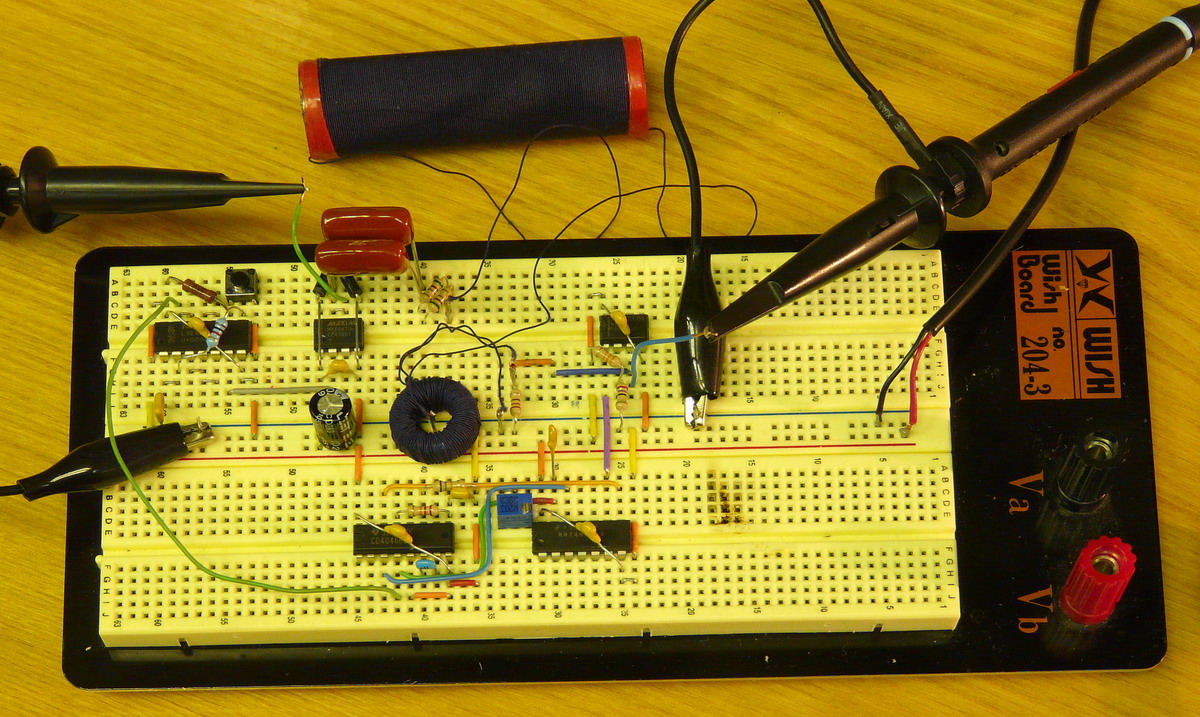
Рис.18. Общий вид макета.Можно переходить к испытаниям.
Настройка и испытание макетаВся настройка макета сводится к регулировке величины компенсирующей задержки при помощи резистора R6 под реальную задержку цепи обратной связи инвертора. Регулировка должна быть выполнена так, чтобы разность фаз между напряжением на контуре и током стала равна нулю. Поскольку слабая монотонная частотная зависимость отрицательной задержки от частоты все же есть, эту настройку лучше выполнить в середине рабочего диапазона по частоте. В нашем случае мы это сделаем для «пустого» индуктора. Конечный результат настройки показан на рис.19.
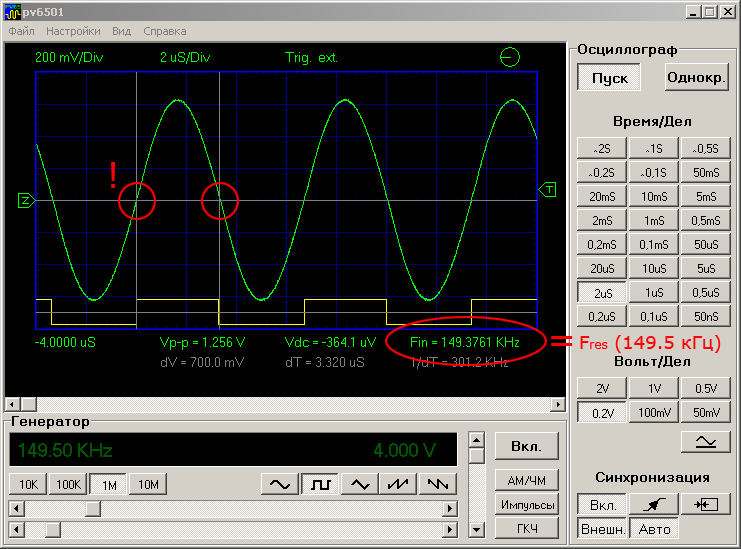
Рис.19. Точная компенсация задержки («пустой» индуктор).Теперь проверим работу нашего компенсатора с другими нагрузками. Для этого поместим в индуктор медь (высокие резонансные частоты) и феррит (низкие резонансные частоты). Результаты этих экспериментов показаны на рис.20.
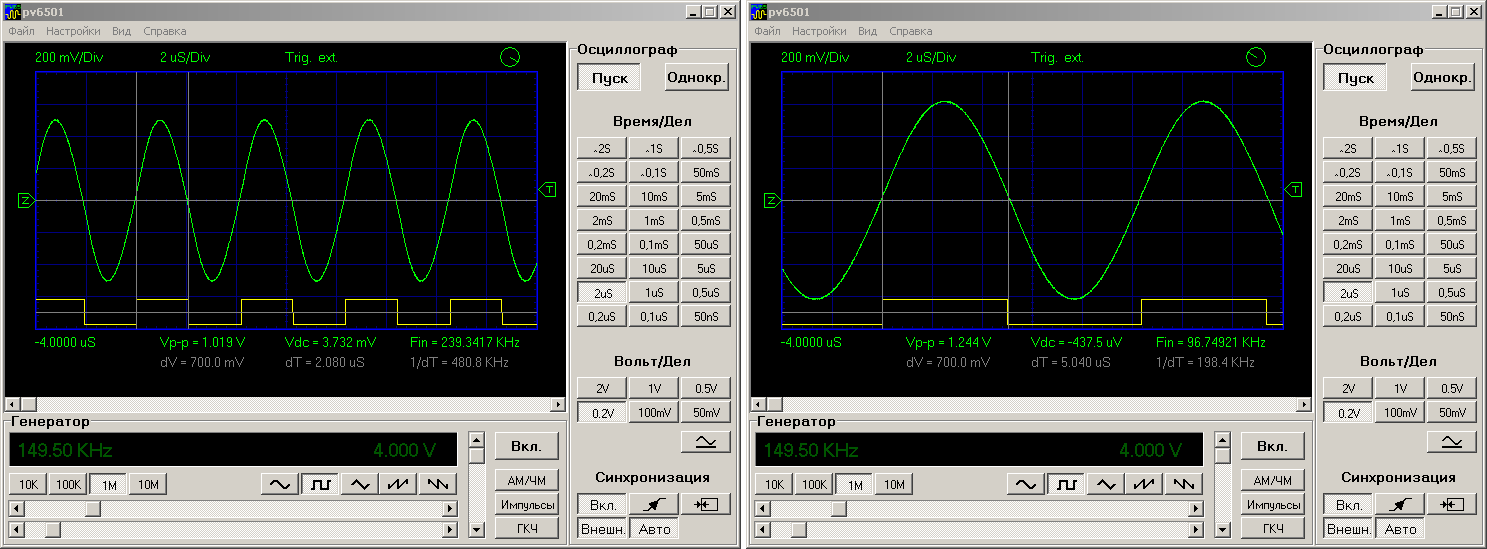
Рис.20. Осциллограммы сигналов при заполнении индуктора медью (слева) и ферритом (справа).Мы видим, что автогенератор с компенсацией задержки довольно точно отслеживает изменение резонансной частоты контура. При очень внимательном рассмотрении (с большой «растяжкой» развертки) можно заметить небольшие различия фаз тока и напряжения, вызванные ее слабой зависимостью от частоты (рис16), но с практической точки зрения эти отклонения несущественны.
Обсуждение результатовИтак, при помощи компенсатора задержки нам удалось решить проблему недостаточно точной автоподстройки частоты. В принципе, практически любой инвертор напряжения можно превратить во вполне приличный автогенератор при помощи такого компенсатора. Конечно, строго говоря, называть результирующую систему автогенератором можно лишь с определенной долей условности, т.к. отдельный независимый генератор (ГУН) в системе все-таки присутствует. Если, конечно, иметь в виду рассматриваемый здесь компенсатор на базе ФАПЧ. Но это скорее уже вопрос терминологии, который не имеет особого смысла обсуждать в данной статье. Тем не менее, по принципу настройки инвертора на резонанс с нагрузкой эта схема работает как самый настоящий автогенератор. Эта схема генерирует сигнал вблизи резонанса только благодаря избирательности колебательного контура, включенного в результирующую цепь положительной обратной связи. Т.е. в основе автоматической настройки частоты лежит резонансная АЧХ контура.
На рис.21 показана практическая схема компенсатора (слева) и готовая плата (справа). Компаратор тока включен в состав этой схемы. Это сделано для удобства. Таким образом, сигнал с трансформатора тока подается непосредственно на вход компаратора, а опережающий выходной сигнал поступает на вход драйверов инвертора напряжения или на промежуточный модуль PDM-регулятора мощности.
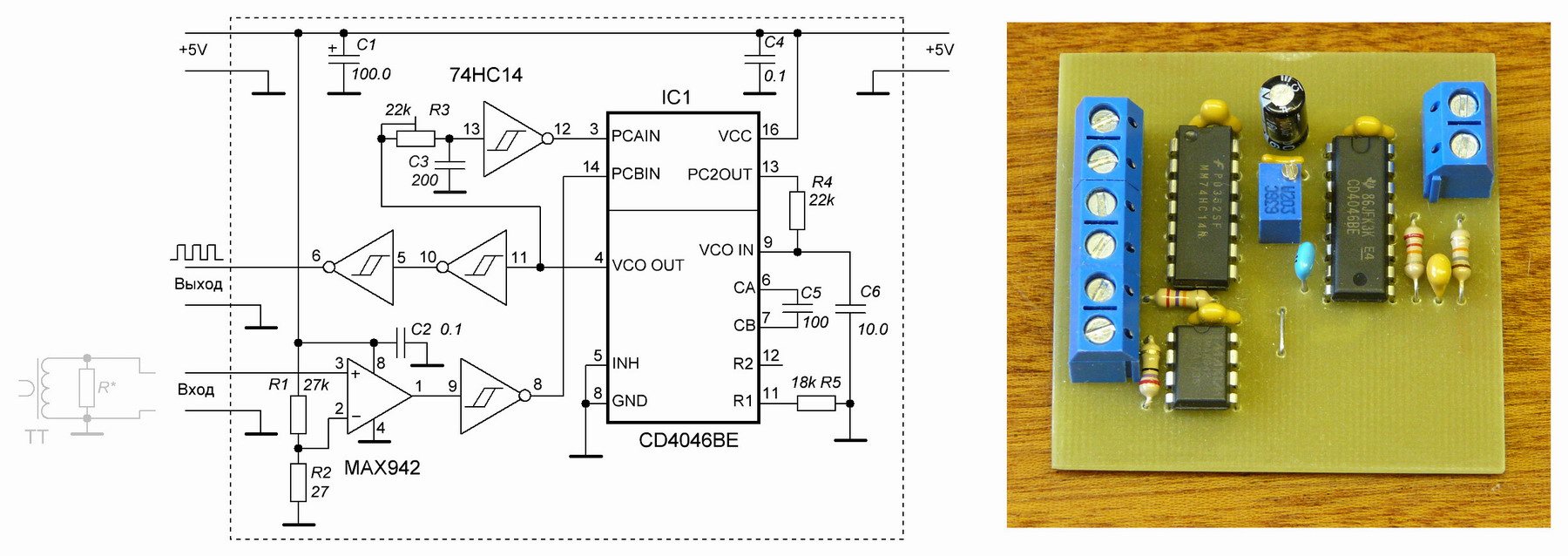
Рис.21. Практическая схема цепи ОС автогенератора с компенсатором задержки и готовая плата.Ну и, наконец, перейдем к третьему методу подстройки частоты инвертора. Это – фазовая автоподстройка частоты (ФАПЧ).
Инверторы с ФАПЧФазовая автоподстройка частоты (ФАПЧ), как система автоматического регулирования, имеет долгую историю развития, огромное количество различных приложений и вариантов реализации. Неплохую библиографическую подборку публикаций, связанных с ФАПЧ, начиная с 1922 года (!), можно найти в книге [7]. Круг задач, решаемых при помощи ФАПЧ очень широк. Даже на протяжении данной статье мы уже дважды применяли системы ФАПЧ. Первый раз в качестве синтезатора частоты для автономного генератора, второй раз – для компенсации задержки сигнала в инверторе. В этих приложениях использование ФАПЧ, конечно, носило вспомогательный характер. Но в данном разделе мы будем использовать систему ФАПЧ по прямому назначению - для непосредственной автоматической настройки инвертора в резонанс с нагрузкой.
Особенностью ФАПЧ, как системы регулирования является то, что сигнал ошибки пропорционален разности фаз двух сигналов, подаваемых на фазовый детектор. Традиционное и наиболее частое использование ФАПЧ – настройка управляемого генератора на некоторую эталонную частоту. В этом случае одним сигналом, подаваемым на вход фазового детектора, является эталонный (опорный) сигнал, а вторым – сигнал управляемого генератора (обычно это ГУН). Однако, в инверторе, работающем на резонансную нагрузку, нет источника эталонной частоты. Использование сигнала тока с контура в качестве образцового сигнала некорректно, поскольку контур совершает вынужденные колебания, частота которых определяется частотой вынуждающей силы (или какой-нибудь ее гармоники, если она достаточно близка к резонансной частоте). Поэтому в общем случае частота сигнала тока не имеет никакого отношения к резонансной частоте контура.
К счастью, у колебательного контура есть замечательный критерий резонанса, о котором мы здесь уже неоднократно говорили – в резонансе разность фаз тока и напряжения равно нулю. Ток и напряжение как раз и есть те сигналы, которые мы можем подавать на входы фазового детектора. Систему управления организуем следующим образом. Сигнал с выхода фазового детектора подадим на управляющий вход ГУН. Сигнал с выхода ГУН подадим на драйверы ключей инвертора. Если теперь мы подадим на вход фазового детектора сигналы тока и напряжения с контура таким образом, чтобы равновесное состояние системы управления соответствовало нулевой разности фаз на фазовом детекторе, то ГУН будет генерировать точно на резонансной частоте нагрузки, обеспечивая тем самым нулевую разность фаз между током и напряжением. Это как раз то, что нам нужно.
Схема макетаБлок-схема инвертора с такой автоподстройкой частоты приведена на рис.22.
Рис.22. Блок-схема инвертора с ФАПЧ.В том или ином варианте, этот способ настройки инвертора в резонанс с нагрузкой лежит в основе многих конструкций. Как промышленных, так и любительских. Оценим работу ФАПЧ и на нашем макете. Для этого нам нужно внести минимальные изменения в его схему – буквально, как говорят, «перекинуть один провод». На рис.23 он отмечен красным цветом (сравните с рис.17).
Рис.23. Схема макета инвертора с ФАПЧ.Линию задержки в виде цепочки R6, C6 с последующим триггером Шмитта мы оставим для того, чтобы компенсировать задержку сигнала тока, возникающую в компараторе. Поскольку сигнал напряжения мы берем непосредственно с контура, а сигнал тока - после компаратора (для MAX942 задержка составляет около 80 нс), то первый необходимо задержать на эти же 80 нс, что и мы сделаем при помощи цепочки R6, C6. Отметим, что в отличие от компенсатора, описанного в предыдущем разделе, эта компенсирующая задержка является самой обычной, «положительной».
Результаты испытанийВключив макет с «пустым» индуктором, компенсируем задержку сигнала тока в компараторе регулировкой R6. Для этого сигналы тока и напряжения с точек, указанных на рис.23, подадим на двухлучевой осциллограф, и регулировкой R6 добьемся нулевого сдвига фазы между сигналами тока и напряжения. После этого можно вставлять в индуктор различные образцы и наблюдать за поведением ФАПЧ при смене нагрузок. На рис.24 представлены соответствующие осциллограммы. На первом снимке – ток и напряжение с «пустым» контуром после завершения регулировки. В остальных случаях подстройка ГУН происходит уже автоматически при неизменном значении R6.
Мы видим, что инвертор с ФАПЧ практически идеально настраивается на резонансную частоту инвертора. Переключения ключей происходят строго в нуле тока. Это и не удивительно, поскольку именно этот критерий (равенство фаз тока и напряжения) положен в основу данной системы автоматического регулирования.
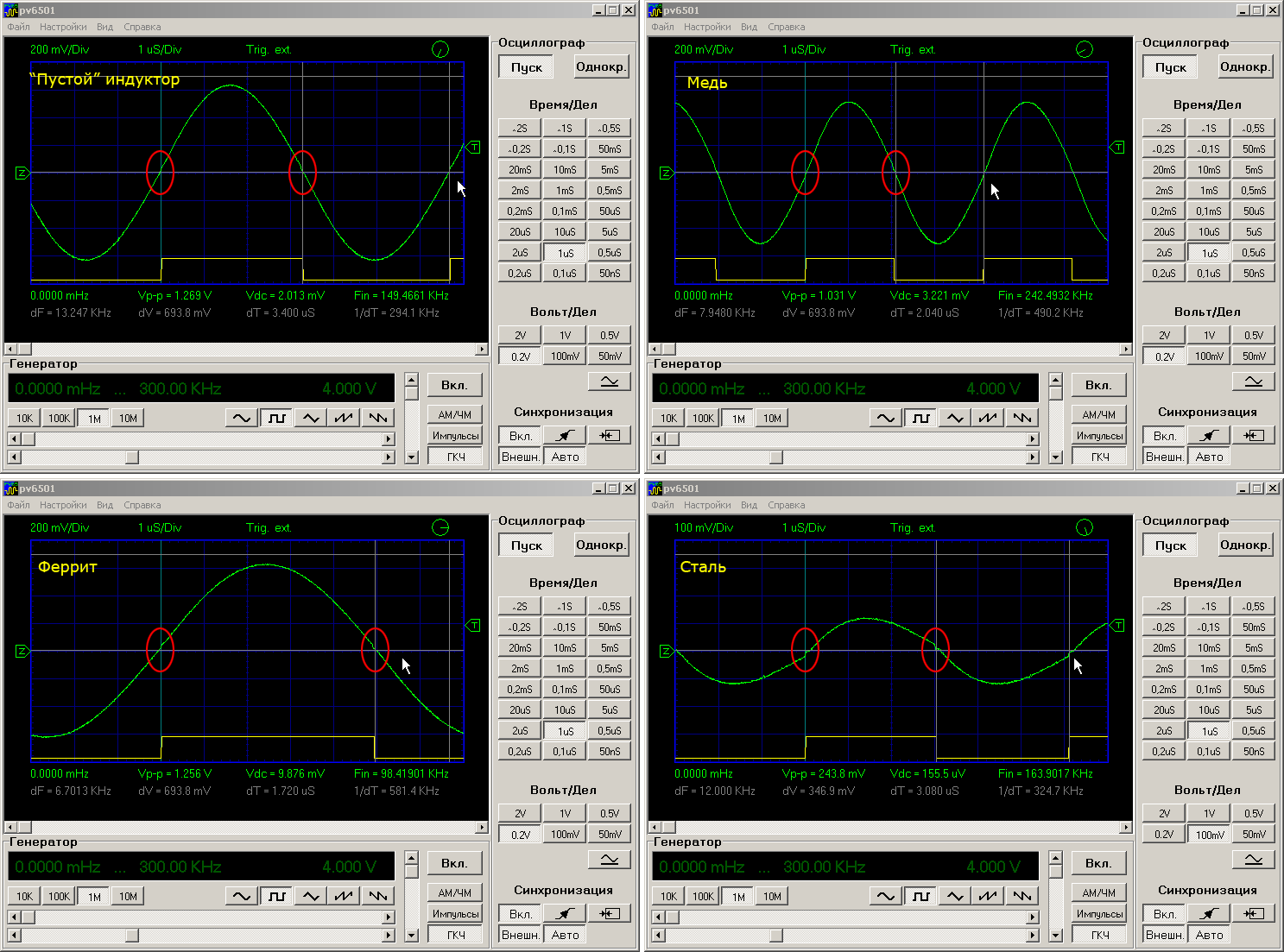
Рис.24. Результаты испытаний инвертора с ФАПЧ.К сожалению, как мы уже отмечали выше, такой вариант автоподстройки частоты плохо совместим с PDM-регулированием мощности, на котором, как на основном варианте регулятора мощности лабораторного инвертора, мы остановились в предыдущей статье [1].
Выводы и обсуждениеИтак, в данной статье мы завершили анализ вариантов и схемотехнических решений, связанных с управлением лабораторным инвертором, который был начат в предыдущей работе [1]. Подчеркнем, что речь идет о многофункциональном модульном устройстве, предназначенном для решения достаточно широкого класса лабораторных задач, связанных с индукционным нагревом, питанием высокочастотных разрядов и ультразвуковых излучателей и т.п.
В первой статье [1] мы проанализировали варианты регулирования мощности и остановились на PDM. В данной статье мы рассмотрели основные классы решений, связанные с подстройкой частоты инвертора на резонанс с нагрузкой. Если вести речь об автоматической подстройке частоты, то предпочтительным вариантом является «автогенераторный» принцип с компенсацией задержки. Несмотря на то, что инвертор с ФАПЧ обеспечивает более высокую точность автоподстройки, он требует более сложной логики в случае использования PDM-регулирования мощности. Для рассматриваемого класса задач такие решения вряд ли оправданы. В то же время более простые «автогенераторные» схемы позволяют добиться сопоставимых результатов просто за счет компенсации задержки.
В то же время для некоторых лабораторных задач автоматическая подстройка инвертора не нужна (а иногда бывает и даже вредна). Поэтому, помимо автоматической подстройки частоты, в лабораторном инверторе необходимо предусмотреть возможность ручной регулировки. Для этой задачи хорошо себя зарекомендовал автономный генератор на базе ФАПЧ-синтезатора частоты. Так же, как и автогенератор, он хорошо сочетается с PDM-регулированием мощности и дает сетку частот достаточно плотную для данных приложений.
Исходя из этих соображений, был изготовлен набор унифицированных модулей, при помощи которых, как с «конструктором», можно легко реализовать различные системы управления лабораторным инвертором. Этот набор представлен на рис.25. С помощью этих модулей можно реализовать следующие варианты.
- Частотное регулирование мощности (блок-схема на рис.26a).
- Ручная настройка частоты с PDM-регулированием мощности (блок-схема на рис.26a).
- Автоматическая подстройка частоты (по принципу автогенератора) также с PDM-регулированием мощности (блок-схема на рис.26b).
.
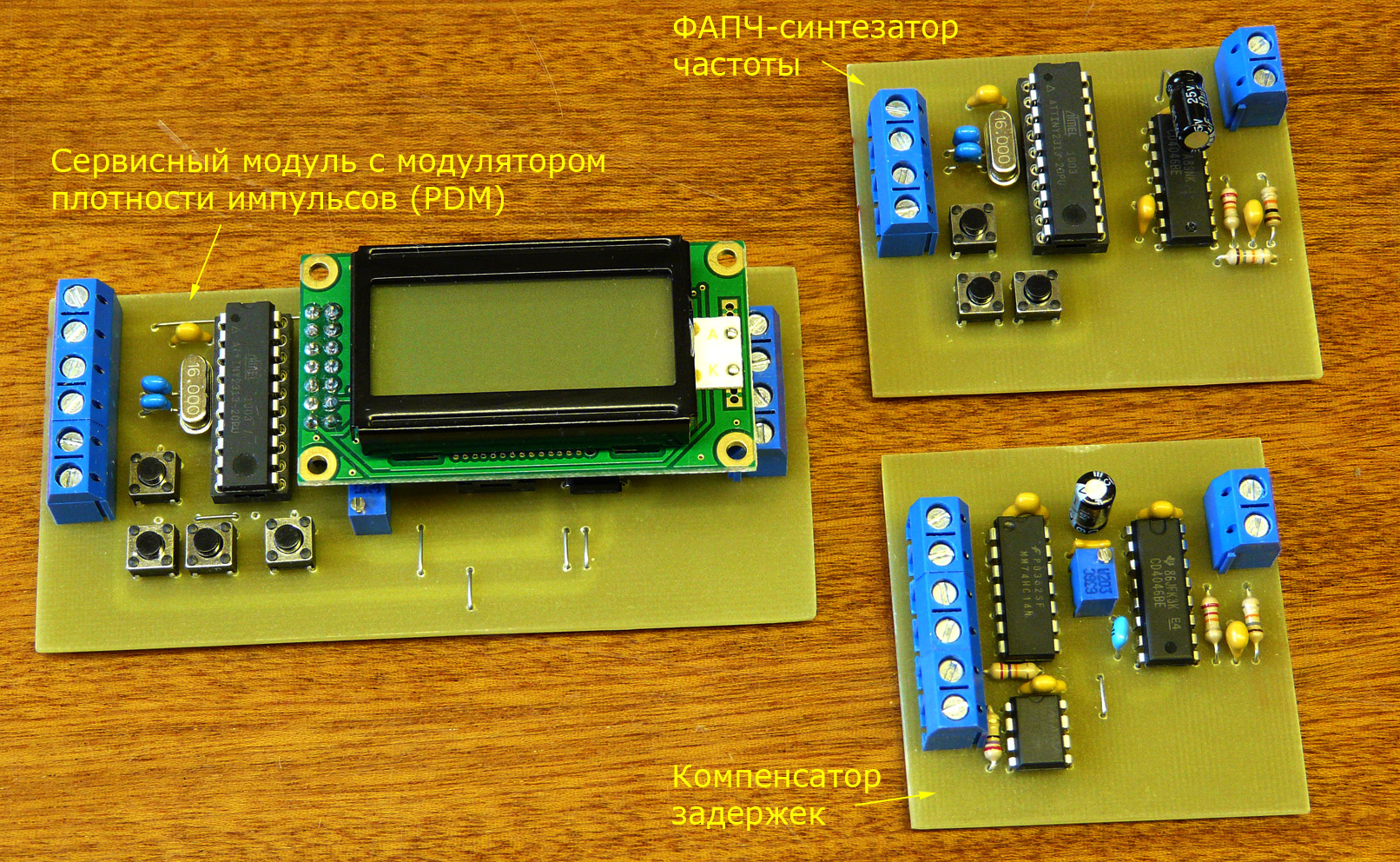
Рис.25. Набор модулей для разных вариантов управления лабораторным инвертором.
Рис.26. Варианты схем управления лабораторным инвертором.Схемы, рисунки печатных плат (для «лазерного» утюга), прошивки и исходные тексты программ для микроконтроллеров можно найти в архиве дополнительных материалов к данной статье [6].
В принципе, эти модули можно использовать с различными вариантами инверторов напряжения, которые допускают внешнее управление драйверами ключей. Рассмотрением этих вопросов мы и займемся в следующей статье.
Литература
- Кухтецкий С.В. Цифровой модулятор плотности импульсов для регулирования мощности инвертора: http://www.icct.ru/Practicality/Papers/01-11-2010/Invertor-03.php или Статья в формате pdf
- Кухтецкий С.В. Простой лабораторный инвертор для индукционного нагрева.
http://www.icct.ru/Practicality/Papers/30-03-2010/Invertor-01.php или Статья в формате pdf - Кухтецкий С.В. Простой лабораторный инвертор для индукционного нагрева. Часть 2.
http://www.icct.ru/Practicality/Papers//05-07-2010/Invertor-02.php или Статья в формате pdf - Синтезаторы частоты: http://rf.atnn.ru/_sint.html
- Основы теории синтезаторов частоты: http://rf.atnn.ru/s4/sy-te.html
- Архив материалов к статье
- Шахгильдян В.В., Ляховкин А.А. Системы фазовой автоподстройки частоты. М., Изд-во «Связь», 1972, с.448.
Работа выполнена при частичной финансовой поддержке ОХНМ РАН (проект №5.5.3) и ГК № 02.740.11.0269.
- Автогенератор готов - можно приступать к экспериментам.
- Войдите, чтобы оставлять комментарии